이 시간 동안 우리는 3D로 변환하는 방법을 배웁니다.
(3D 스케일링)

(3D 회전)
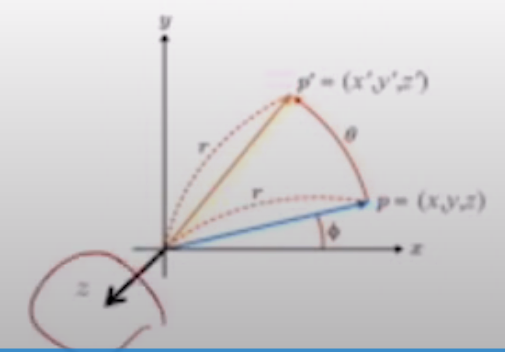
2D 회전은 항상 ‘점 중심’이었습니다.
3D 회전 축을 중심으로 회전하다.
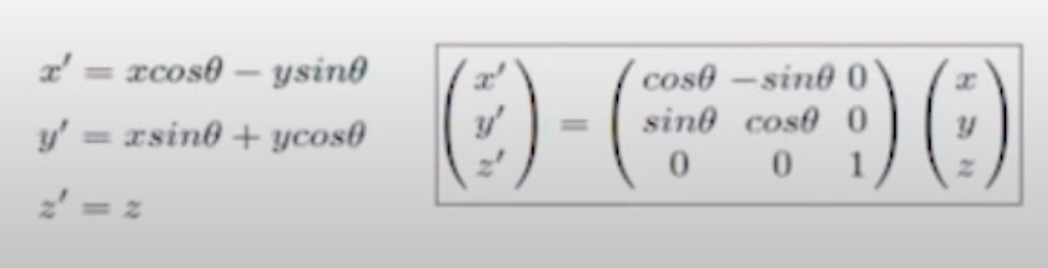
예_1) z축 회전
x와 y만 변경됩니다. (z 좌표는 회전 후에도 유지됩니다.)
R 부분을 변경할 수 있습니다.


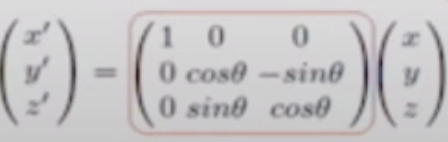
ex_2) x축 회전

ex_3) y축 회전

ex_4) CCW 대 CW 회전
왼쪽 회전 Θ는 양수입니다.
시계 방향 회전은 Θ를 음수로 만듭니다.
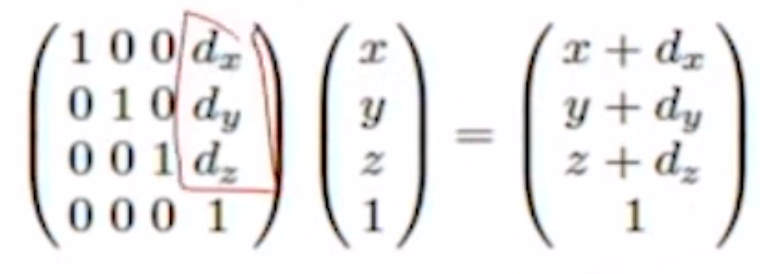
(3D 번역)
2D에서와 같이 크기 1보다 큰 단위 행렬을 곱합니다.
4×4 항등 행렬로 이동하기에 충분한 변위 벡터 Dx Dy Dz를 삽입하기만 하면 됩니다.
(3차원 모듈을 4X4 곱셈으로 표현)
ex_1) 스케일링

ex_2) 회전

ex_3) 번역
( 우주 공간 / 물체 공간 )
“객체 공간”
모델링 결과는 원점을 기준으로 생성 및 정렬됩니다.
“단어 공간”
이러한 결과를 실제 게임이나 영화의 3D 공간에 배치하려면
해당 변환을 수행해야 합니다. “공간”이라고 합니다.
“변혁의 필요성”
객체 공간에서 외부 공간으로 이동할 때 변환이 필요합니다.



(Q. T파트는 언제 그대로 나오고 L과 합치는지는 언제 나오나요?)
채팅 GPT 응답:
RT구간에서 T구간은 일반적으로 3차원 공간에서 물체의 위치를 변형시키는 과정을 말한다. T 간격은 객체를 이동시키는 이동 값뿐만 아니라 회전 값과 스케일링 값도 포함할 수 있습니다.
따라서 RT 구간에 T 구간의 이동값만 나타나는 경우 객체를 이동시키기 위한 이동 동작만 수행하고 회전이나 스케일링 등의 이동 동작은 수행하지 않는다. 이 경우 변환 행렬은 다음과 같이 표현할 수 있습니다.
|1 0 0 송신|
|0 1 0 타이|
|001츠|
|0 0 0 1 |
위 행렬에서 Tx, Ty, Tz는 객체를 이동시키는 이동값으로 이동값과 동일한 값을 갖는다. 그러나 다른 변환 작업을 수행한 경우(예: B. 개체를 회전 또는 크기 조정하면 T 간격의 변환 값이 변환 값과 다를 수 있습니다.
(회전 및 객체 공간 기준)
– 객체와 객체 공간은 항상 함께 존재합니다.
회전은 개체의 방향을 변경합니다. -> 개체는 개체 공간에 단단히 바인딩됩니다. -> 객체가 회전하는 방향은 객체 공간의 기준 방향으로 특징지을 수 있다.
ex_1) 회전 예시
개체 공간: { u, v, n }
공백: {e1,e2,e3}
회전 전: 객체 공간과 외부 공간이 동일합니다.
e1 = u = x축
e2 = v = y축
e3 = n = z축
회전 후: 개체 공간과 공간이 다릅니다.
e1 = 그리고 n = x축
e2 = v = y축
e3 = N -u = z축

– 객체 공간 기준(u,v,n)을 알고 > R을 즉시 계산할 수 있습니다.
– R이 주어진다. -> 회전(R)으로 변형된 오브젝트 공간 기반도 바로 볼 수 있습니다. 기둥만 잡으면 됩니다.
1시 15분부터 다시 듣기
(모든 축을 중심으로 회전)
임의의 축을 중심으로 회전하는 객체의 객체 공간 기준(u,v,n)을 알고 있는 경우,
우리는 단순히 R 행렬(회전)을 얻을 수 있습니다.
